
头发丝可以递送微纳米机器人?ETH团队发明最小尺度的可靠药物递送
自1966年的好莱坞电影《神奇旅程》(Fantastic Voyage)以来,研发可以在体内导航并治愈疾病的微型机器人,就一直是科学家和工程师的梦想。过去十年中,世界各地的研究人员开发了许多自主移动的磁性微纳米机器人,可以通过外界的磁场控制在三维环境中游动,并且在功能性上也有了很大的发展。
1966年好莱坞电影《神奇旅程》(Fantastic Voyage)
然而,由于这些微纳米机器人的运动速度相对较低,且非常依赖周围的流场环境和边界,需要集成准确的跟踪定位系统、强大的磁性驱动,以及复杂的控制算法。
受生物细胞内蛋白马达沿着细胞微管运动的启发,来自苏黎世联邦理工学院和宾夕法尼亚大学的研究团队研发了磁性的人工微管,可在复杂的体内环境里快速可靠地传输磁性微纳米机器人,未来还可能通过微血管,实现早期肿瘤更准确的药物递送。该研究结果于2022年7月21日在线发表在Nature Machine Intelligence杂志上。
网页截图
“将微纳米机器人沿着血管逆流而上递送到肿瘤的位置,是一件可实现,但极其困难的事情。”文章的第一作者和通讯作者顾红日解释道,“就好比是控制四旋翼无人机在暴风雨中将快递送到遥远的村庄,但整个规模缩小几千倍。”
在现有的微创治疗中,医用导管是最稳定可靠的递送方案,药物可以通过一个封闭的管道到达指定位置。然而到目前为止,这种封闭的传输方案依然很难微型化。在小尺度下,流体的粘滞阻力影响非常显著,药物没有办法从导管中挤出。
为了克服这些障碍,顾红日及其同事从生物学中寻找灵感:“微管是细胞骨架的一部分,它使用蛋白马达将囊泡运输到细胞中的不同位置。这些蛋白马达并不需要一个封闭的环境,他们通过和微管的相互作用,沿着微管一步一步前进。我们也试图通过设计磁性的人工微管和磁性的微纳米机器人,复制相似的传输过程。”
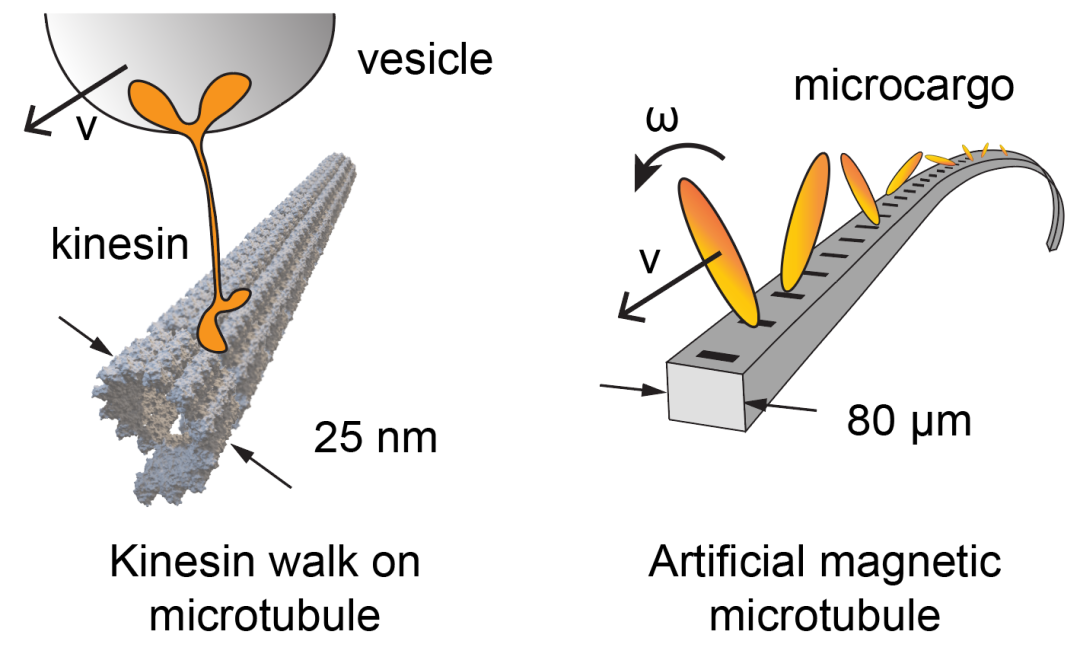
细胞微管的主动传输(左)和人工微管(右) | 团队供图
人工微管并没有管状的结构,而是实心的纤维,内嵌了许多小磁体。虽然它只有80微米宽,但可以有几厘米长,像一根头发丝一样。通过施加旋转磁场,磁性微纳米机器人可以与小磁体相互作用,利用磁力有效的前进。与现有技术相比,该微纳米机器人系统在同样的驱动频率下,行动速度快了大概一个数量级。
研究人员发现,人工微管可以有效地逆流而上,甚至在比水粘一千倍的甘油中也可以快速移动。此外,该研究还发现了一种“集群运动模式”:微小的磁性颗粒可以通过自组织,变成大型的颗粒簇,通过粒子相互作用,更加快速高效地沿着人工微管移动。
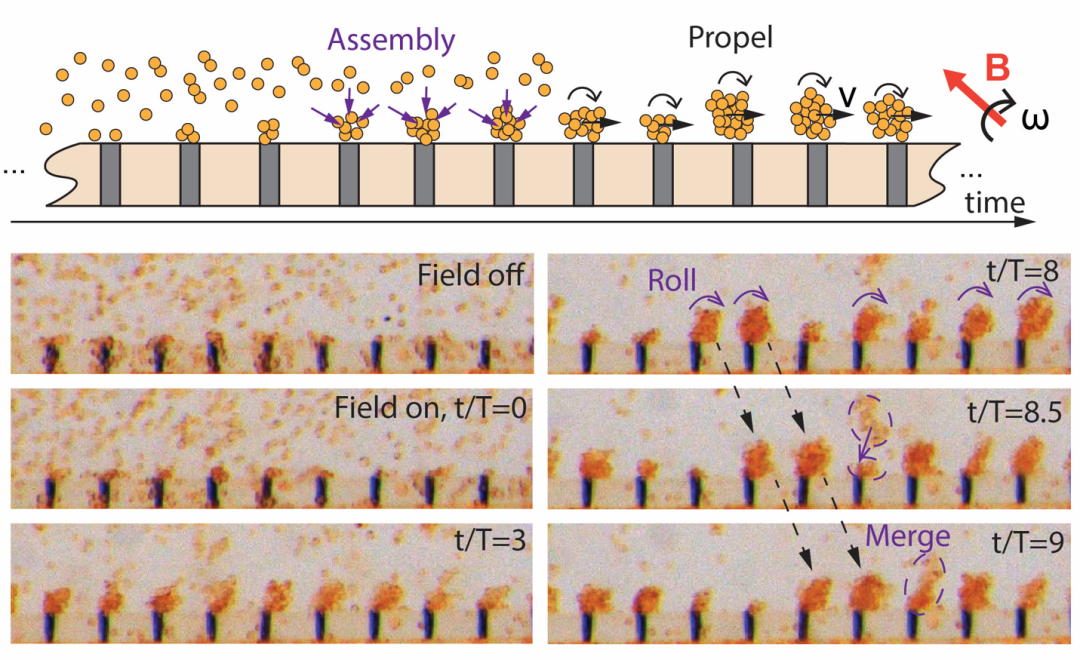
磁性颗粒在人工微管上的自主装和团簇 | 团队供图
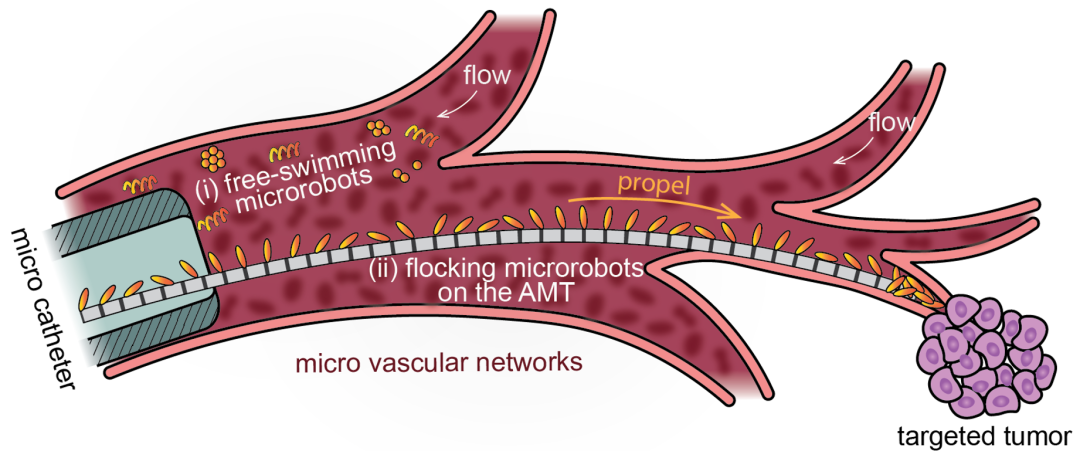
在微血管网络中应用人工微管的使用场景。(i)自由游动的微纳米机器人;(ii)沿人工微管运动的微纳米机器人 | 团队供图
研究团队也描述了未来,该人工微管在微血管网络中可能实际应用的场景。首先,将直径约0.5毫米的微导管插入可到达的血管末端;然后将直径0.05毫米人工微管沿导管推出,借助外加磁场,将其引导至通往目标肿瘤的小血管分支处;微纳米载药机器人在磁性驱动下,沿着人工微管一路到达目标肿瘤,最终实现给药。与自由游动的微纳米机器人相比,微型机器人沿人工微管的运输将会速度更快,也更可靠。
体内磁性微纳米机器人尽管在成像、材料、驱动、控制和导航方面取得了诸多进步,但由于人体环境高度复杂,这些过程目前可靠程度仍然较低,因此实际应用仍然非常具有挑战性。通过引入人工微管,研究团队相信,这些“微型机器人的微型高速公路”可以结合已有的微型导管和导航技术,帮助现有的磁性微纳米机器人,让未来的精准医疗更进一步。
参考文献
Gu, H., Hanedan, E., Boehler, Q. et al. Artificial microtubules for rapid and collective transport of magnetic microcargoes. Nat Mach Intell (2022).
https://doi.org/10.1038/s42256-022-00510-7
作者:团队供稿
编辑:靳小明
排版:尹宁流
题图来源:《神奇旅程》
研究团队
通讯作者 顾红日:博士毕业于苏黎世联邦理工学院,目前是康斯坦茨大学物理系的博士后研究员。研究兴趣包括磁性软体机器人和仿生机器,为未来的颠覆性医疗技术开发新的磁性材料,医疗设备,手术工具, 以及机器人系统。
通讯作者 Arnold Mathijssen:宾夕法尼亚大学物理与天文学助理教授,多项联邦资助的获得者,以及流体物理学杂志的客座编辑。
通讯作者 Brad Nelson:苏黎世联邦理工学院机器人与智能系统教授,在机器人技术领域拥有超过 30 年的经验,并因其在机器人技术、纳米技术和生物医学方面的工作而获得了多项奖项。Nelson 教授是瑞士工程院 (SATW) 的成员,并在北美、欧洲和亚洲的多个学术部门和研究机构的顾问委员会任职。他是多个学术期刊的编委,包括《科学机器人》和《控制、机器人和自主系统年度评论》的创始编委。他曾两次担任 ETH 机械与过程工程系主任,ETH 电子显微镜中心主席,以及瑞士国家科学基金会研究委员会成员。
论文信息
发布期刊Nature Machine Intelligence
发布时间 2022年7月21日
论文标题 Artificial microtubules for rapid and collective transport of magnetic microcargoes
(DOI:https://doi.org/10.1038/s42256-022-00510-7)
未来光锥加速器是果壳硬科技发起的早期科技创业加速器,为科学家创业提供从公司注册、知识产权,到融资需求、团队组建等不同阶段的方案建议。加速科技成果从实验室到市场的转化,加速一部分科学家迭代成为CEO。
果壳团队有着长达12年为科学家服务的经验,我们始终站在科学家的视角出谋划策,做科创者的好朋友。如果您正打算创办一家科技企业,无论是找钱、找人、找资源,还是找订单,都欢迎与未来光锥团队聊聊。您可发送bp或其他项目资料到wlgz@guokr.com,并留下联系方式,或添加果壳硬科技企业微信,私信沟通。

✦
✦
点击阅读原文即可查看原论文