
没有真人能给你走心拥抱时,机器人会出手
谁都有 emo 的时候,但不是每个人都能找到人抱一抱。
这个痛点,也被科学家 Alexis Block(以下简称布洛克)看到了。从 2017 年开始,她就在研究如何让机器⼈学会拥抱。后来,她加入了著名的德国“⻢普所”——这里曾出过 37 位诺⻉尔奖得主。
这个项目可没那么容易。因为他们做了 6 年的这款机器人,并不冷冰冰,非常有人味儿:
当人们走近它的时候,它会抬起手臂,热情的问一句“我能得到一个拥抱吗”;
它会根据人的身高调节自己,给出一个恰如其分的抱抱,还能调节不同的“挤压”力度,让拥抱更加深情;
它还可以对不同的拥抱姿势做出反应:比如人们希望多抱住一会儿,它会对此心领神会,而不是提前松开自己的机械手臂……

这种拥抱真实到什么程度呢?真实到参与前期实验的人们甚至都不愿意称之为“它”。
更奇妙的是,大家纷纷说起被机器人拥抱那一刻的感受时,都有具体的对应,像“拥抱爱人”,像是“来自母亲的安慰性拥抱”,对方仿佛是“葬礼上的某个远房亲戚”、“在足球比赛中见到的朋友”,甚至有人说像在“拥抱前任”。
这种情感对应的差异,与当时人们的心理状态有关,也和机器人在每次试验中拥抱他们的动作和程度相关。

但这都在说明,马普所研发的这款 HuggieBot 3.0 挺“人模人样”的。
马普所为什么要教机器人拥抱?
人类贪恋肌肤之亲。
自被父母从襁褓里抱起来,人们就开始与他人亲密接触,我们在被轻抚、拥抱与按摩时,荷尔蒙被释放,能够极大缓解压力、焦虑,降低心率、血压。
特别是持续三秒种以上的紧紧拥抱,会更加强人们肌肤触碰时的愉悦程度,这也被称为“深层压力触摸”。
人们每天“拥抱 4 次才可以生存,至少要抱 8 次才能身心健康”,美国知名心理治疗师维琴尼亚·萨提亚提出过“四个拥抱”理论。
但你懂的,并不总有人能时时刻刻陪伴你,所以你才会通过裹紧被子来自行实现“深层压力触摸”。
陪伴和慰藉的缺位,人们希望科技能填补。
比如,就有团队做出了能够接收触觉信息的电子腕带:连接手机蓝牙,一方点击发送信息,另外一个人手上的腕带就会挤压与震动。

也有团队发明了“拥抱衫”,这些衣服内嵌传感器,被用在自闭症谱系障碍的儿童身上:家长在一端抱住一个娃娃,传感器就能够捕捉到拥抱的位置、力度、温度甚至心跳,以加热、振动和充气的形式,让另一端的小朋友感知到。

但这些还远远不够。
HuggieBot 的研发员发现,人们对拥抱特别敏感,尤其是“触摸位置”和“接触强度”这两方面。
两个人在感情上越亲近,他们被允许接触的区域就越多,但对于本不亲近的人来说,稍微抱错一点位置就会成为“冒犯”;另外,拥抱的强度不够,容易显得敷衍,而太过用力就会弄疼对面的人。而且对于这种强度的感受还需要因人而异。
所以像是拥抱衫等等的发明,还是没办法还原一个足够温暖、真实的拥抱。
特别是在经历了疫情之后,人们的情感连结在距离与阻碍中变得更加脆弱,更加渴望拥抱。HuggieBot 的主创成员布洛克说,他们研发这款机器人的目的就是希望能通过它送出高度拟人的温暖拥抱,来宽慰那些特别是因为疫情而产生社交疏远的人。

正在与机器人拥抱的布洛克
给出一个“完美抱抱”,并不简单
怎么提高拥抱的舒适度?拥抱这种东西太玄了,但科学家还是想给它量化一下。
2017 年,团队开始了最初尝试,他们做了一个看起来非常粗糙的机器人,并一共设计了 12 种不同类型的拥抱。

原型机器人两个手臂和躯干上都缠上了厚厚的泡沫和棉布
接着,他们找来了 30 个志愿者,让机器人给每个人送来一打抱抱:拥抱时间有长有短,姿势也不尽相同。
出乎意料的是,尽管这个机器人重达 450 磅,跟人差不多高,但没有人因此被压迫到,也没有人因为害怕而中途跑掉。
反而还有好些人说,“很享受与机器人拥抱,因为这种体验很新奇,并不奇怪。”这些积极反馈鼓舞了布洛克和她的团队,他们甚至想要挑战一下“机器人能不能给出一个比真人还好的抱抱”。
于是,他们先是调研了市面上几种机器人,从最早(1992 年)也是最著名的 Temple Grandin 挤压机开始。

看吧,这都不算是机器人,就只是一台机器。机器里的两块泡沫板挤压产生压力,模拟拥抱,它被广泛应用于对自闭者儿童的治疗。
后来,又在此基础上衍生出了模拟动物的产品,但这只是让其变得更“用户友好”了而已。
基于此,布洛克他们做出了初代 HuggieBot。除了给机器人裹上厚厚的紫色棉布之外,他们还用上了各种加热元件,为的就是让 HuggieBot 足够柔软、温暖。
他们还想再往前迈一步:让机器人更自主。
于是,他们在机器人的背部加上了触觉传感器,这些传感器可以拉伸,能检测到用户什么时候开始接触,以及什么时候想结束拥抱,从而预判机器人应该给用户一个“多久、多紧”的抱抱。

很快,布洛克发现他们想得太简单了。
人们对拥抱的开始与结束反应格外敏感。特别是一旦用户表示他们准备好被释放,就要立即释放;松开地太早或太晚,用户就会不高兴。
也就是说,目前这个触觉传感器还不够用。于是,他们开始研发 HuggieBot 2.0——业界第一个使用视觉与触觉同时感知,以此提供拥抱的智能设备。
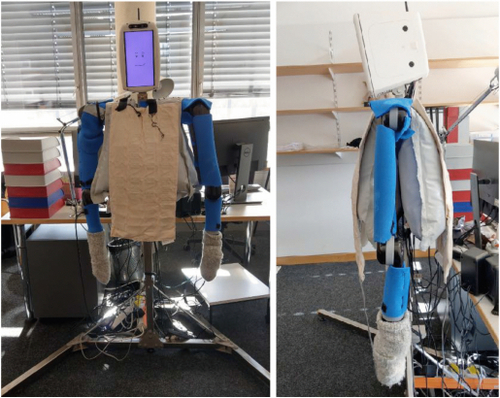
上图这个方方的呆萌头部,其实大有学问:它是一个定制的 3D 打印的箱子,里面有控制整个机器人的戴尔 OptiPlex 7050 微型计算机、英特尔 RealSense 深度感应相机、机器人的面部屏幕、一个小型扬声器和许多条电缆。
它面部的这几个摄像头,能够目不转睛地监测用户的姿态与移动方向。一旦识别到用户走过来,它就会来上这么一句,“请给我一个拥抱,好吗?”同时,脸部会显示一些可爱的动画效果。
它的下身专门装了一个 V 形底座,这能让用户更容易靠过来抱抱。它的身体里还有一个定制的传感系统,叫 HiggieChest,内有一个气压传感器和一个话筒放大器。
简单来说,这样能够能把用户的拥抱触觉快速传到机器人的全身,这样就方便快速做出交互反应了。
同时,为了让机器人根据人的不同体型做动作调整,以及避免其金属手臂伤到来索抱的用户,机器人手臂被设定得十分灵敏和识趣。

首先,机器手臂上的每个关节扭矩都有一个最大阈值,一旦超过了就会停止运动;这些手臂非常灵活、敏感,用户可以轻松就掰倒它们,一旦他们想结束拥抱,掰一掰就好了,直接向机器人传递“抱够了”的信号。
不止拥抱,人们开始对机器人有更多期盼了
布洛克在实验里一共采集了 32 名用户的 512 次拥抱数据,从中发现了一个有趣的现象。
之前为了保证数据采集的精准度,研究团队特意嘱咐了受试者们单次拥抱只能做一个动作,比如抚摸、挤压等。
但是通过实验室的录像,他们发现,32 个参与者里面有 7 个人都不自觉地组合了多种手势,有的人把摩擦和拍打连在一起,有的人在抱紧机器人之后放开一些,又轻轻拍了拍机器人的肩膀。
似乎在单纯的拥抱之外,人们逐渐在机器人身上投射了更多的情感期盼。
在用户反馈里,布洛克也惊奇地发现:比起程序设定好的“完美拥抱角度与过程”,用户其实更喜欢机器人根据他们的动作做出“即兴”的回应。
78.13% 的参与者都说,这种回应会让他们感觉机器人更有活力,更真切,会觉得自己被对方理解了。当前这种动作回馈虽然完整,但太机械,“没觉得机器人像他们那样投入情感”。
所以,在最新版本——HuggieBot 3.0 中,团队为机器人设置了提供“被动回应”与“主动回应”的能力。

简单来说,如果机器人监测到了用户在保持抱抱姿势之外,进行了拍打、挤压、揉搓,机器人就会基于概率,做出不同的反应来回馈。
这些手势可以一次性完成,也可以连续多次重复,机器人有足够的耐心一次又一次地回应。这不比很多真人强多了吗?
但如果人们长时间只是抱抱,没有做什么其他动作的话,机器人就会触发“主动回应”,这其中的间隔大概有 1.5 秒。

所以,拥抱看上去简单,但走心很难。互动也得掌握好火候。
到目前,布洛克团队通过这些年的量化研究,也总结出了一套“拥抱黄金标准”:
柔软;
有温度;
身型大小和成年人相近;
要灵敏地检测到接近的人,做出邀请的动作,拥抱的动作要做到与人同步;
主动调整自己的手臂位置,让被拥抱的人感觉到舒服;
快速感知到对方在拥抱中还释放出了什么愿望;
感知到拥抱过程中的手势;
对这些手势快速做出回应;
每次回应还需要略有不同;
在拥抱过程中,偶尔需要主动,做出一些手势表达关心。
扪心自问,抱人的时候你做到这些了吗?
目前布洛克团队正在紧锣密鼓地开发第四代拥抱机器人,就算此刻没办法入手一个机器人疗愈自己,也可以先活学活用起来。
这么看下来,真诚永远是必杀技。我们不需要一个“完美的拥抱”,我们需要的是“真诚的拥抱”。
一个彩蛋
为了防止有的用户“入戏”太深,用力过猛,科学家们还给机器人换了一套新的躯干:
通过沿边缘热封,然后在热封的顶部使用 HH-66 乙烯基水泥,更坚固,更承压。
因为之前有人抱得太紧,结果机器人漏气了啊!
参考文献
作者:Lilyann
编辑:biu
如无特别指出,图片均来自参考文献 [1] 和它附上的视频截图
本文来自果壳,未经授权不得转载.
如有需要请联系sns@guokr.com
