

| DIYer: | chein |
|---|---|
| 制作时间: | 1天 |
| 制作难度: | ★★☆☆☆ |
| GEEK指数: | ★★☆☆☆ |
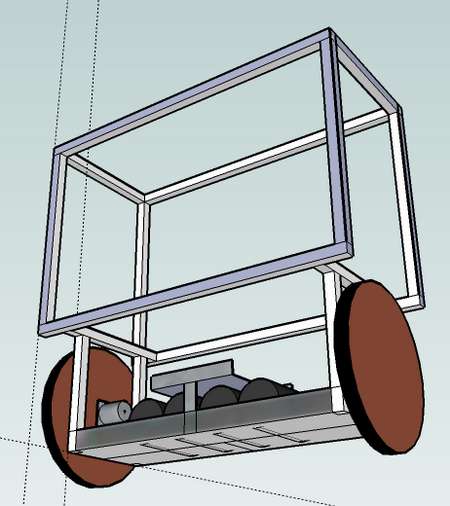
2 组装底板
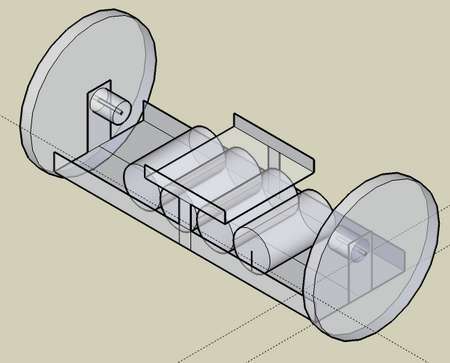

- 制作托架:我选取的材料是中密度纤维板,还有铝制的角钢固定在上面。当然你也可以选用其他更好找到的材料,像是亚克力板。
- 托架的长度取决于你选取的材料,但宽度一定要足以放下D号电池支架(注:D号电池即一号电池)。电池的摆放位置至关重要,它占了整个机器人重量的一大半。横向和纵向上,电池务必沿中轴线排列,不偏向任一边。否则多摩君一边的轮子将承受更多重量,也就无法保持平衡地移动了。
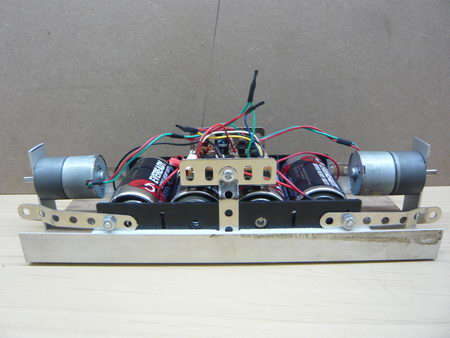
- 采用的直流减速电机参数如下:12V,100mA,130转/分钟,58.8mN•m(转矩)。但我们只让电机以一半的功率运行(大概是5.5V,50mA)。
- 我选用直流减速电机而不是普通电机,是因为它转速更低,且扭矩足够驱动整个多摩君。按图示装好电机后,它底下还余下些空位,你也可以再填充些别的,稳定重心。
- 机器人的电路装在电池的上面。 我本来想自己设计个电路,最终还是偷懒,暴力拆解了一台遥控车。

4 “试驾”
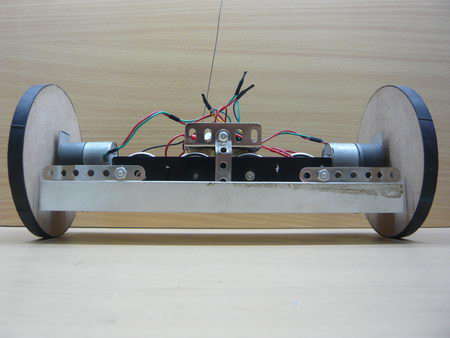

- 对着电机轴把轮子装上。好了,可以试着发动,看看各部件是否都能保持平衡。
- 根据减速电机参数的不同,以及重量的分配,试驾过程可能出现以下状况:
- 1.机器人走不动或卡住,因为电机没法提供足够的扭矩。
- 2.电机扭矩过大,托架完全旋转,即发动后机器人可能原地打转。
- 3.机器人能够移动但托架轻微摇摆,机器人发动或改变方向时可能出现这种情况。
- 解决办法:
- 如果机器人卡住了,试着把电池换成C号(注:中国的2号)或AA号(注:中国的5号),但你最好还是换一个更大扭矩的电机。
- 如果托架打转,在电机上加上限流电阻器以减小电力,或再试试往托架上增重(下文有详解)。我选择双管齐下,把电机功率调节至5.5V, 50mA。
- 机器人发动或变换方向时,托架有轻微的晃动很正常。主要原因与发动机的扭矩相关,让轮子自己转转,很快就能恢复平衡了。
- 我把小车的无线控制器改了改,给机器人装上。
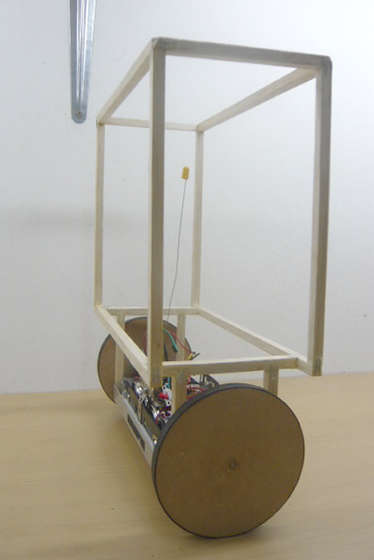
5 构建机器人身体框架
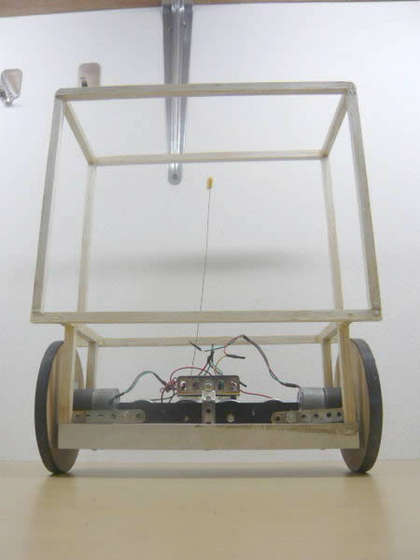
- 我用轻木制作机器人的骨架,当然你也可以选取别的材料,但最好是尽可能轻便。连接处用胶枪粘合,再用钉枪加固即可。
- 身体框架固定在托板的四角上,上部顶端的木料可以稍微削细一些,这样好给机器人套上外壳
6 进一步调整

- 静止时,机器人要能保持正立。如果它向一方倾斜,就往另一方适当增重。务必保持平衡。
- 你也可以微调多摩君摇晃的程度,托架上承重越多,机器人走得也就越“稳健”。但注意加重一定要平均分配,且需考虑到加上外壳后,上部还会增加一定重量。
- 多试几次调整出合适的承重,让你的机器人既能保持平衡又不会过于笨重。
- 调整托架承重的时候请一定注意适度,以免过重的机器人损毁了电机。
- 也可以试试铅制车轮平衡块,调整起来会简单得多。
7 装上外壳


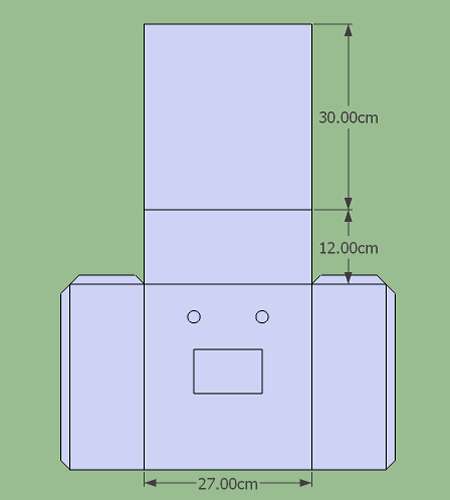
- 在这一步,尽情发挥你的想象力吧!你只需要用硬纸板做一个方盒,有灵感吗?试试吃豆人或是幽灵……都会很有趣。做好的方盒能紧密得套在支架上就行,无需再用胶枪加固了。这样你想要关上电源或是换电池的时候,就会比较方便。
- 好啦,可以让你的多摩君发动起来啦。
8 DIYer签到处
| 编辑: | 白色的小白 |
|---|
果壳DIY站QQ群:132647923, 2群:179240860(加入时请报上你在果壳的个人主页地址,以防广告ID)
果壳DIY站微博: http://t.sina.com.cn/guokrdiy